#01 Úvod do programovania robotov
Programovanie robotov - využitie potenciálu robota na maximum
Programovanie robotov je proces tvorby a testovania inštrukcií pre priemyselných robotov, ktoré sú jedným z najrozšírenejších prostredkov využívaných pri aizovaní výroby. Aby však bolo zaradenie robota do prevádzky skutočne efektívne, je potrebné mu poskytnúť čo najlepšie inštrukcie pre vykonanie úlohy na ktorú bol určený. Jedným z problémov s využitím robotov vo výrobe je práve závislosť na vedomostiach a schopnostiach programátora.
Príklad úlohy robota
Jedným z najbežnejších prípadov využitia robota je manipulácia s materiálom. Napríklad preloženie obrobku z dopravníka do obrábacieho centra.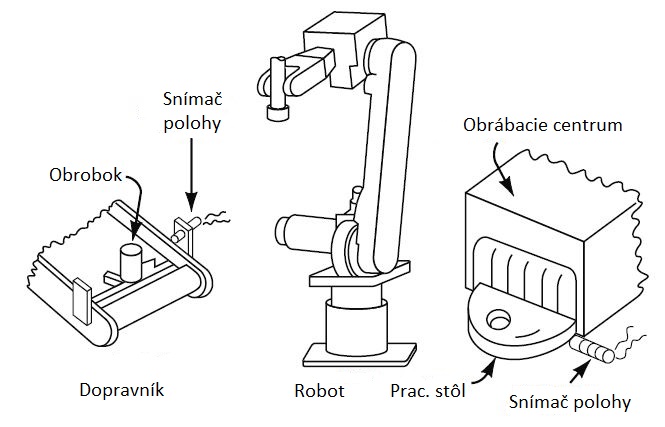 Robot na vykonanie tejto úlohy potrebuje inštrukcie ako napríklad:
Robot na vykonanie tejto úlohy potrebuje inštrukcie ako napríklad:
- Kedy má odobrať obrobok z dopravníka
- Dráhu, ktorou sa dostane do polohy pre odobratie obrobku
- Kedy má otvoriť/zavrieť čeľuste efektora
- Dráhu, ktorou sa dostane do polohy pre uloženie obrobku do obrábacieho centra
Zoznam všetkých potrebných inštrukcií je samozrejme oveľa dlhší. Vyššie uvedené príklady len popisujú, že programovanie je sústredené na vytvorenie čo najideálnejšej dráhy ktorú bude rameno robota s efektorom nasledovať a správne načasovanie jednotlivých činností. Program robota je definovaný v podobe jednotlivých príkazov a inštrukcií v programovacom jazyku ktoré sú uložené v pamäti robota.
Základné prvky programu
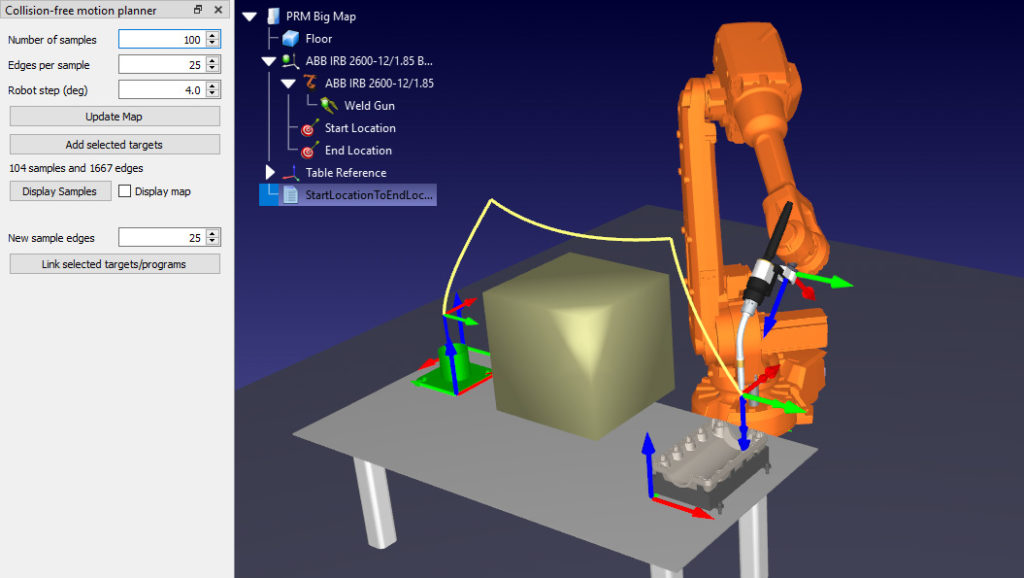
Dráha:Je určená pomocou jednotlivých pozícií robota počas pracovného cyklu. Pozície robota sú definované ako body v priestore ktoré musí robot dosiahnuť alebo cez ne prejsť v danom pracovnom cykle. Pohybové inštrukcie: Definujú pohyby a natočenia jednotlivých kĺbov robota tak aby bol schopný dosiahnuť požadovanú pozíciu. Taktiež určujú či má robot cez danú pozíciu len prejsť, alebo na nej zastaviť ako aj či má daný bod v priestore dosiahnuť, alebo ho len obísť. Input/Output (I/O) inštrukcie: Poskytujú pokyny na základe komunikácie s externými zariadeniami. Vo vyššie uvedenom prípade so snímačmi polohy na dopravníku a obrábacom centre. Tie informujú robota o tom, či je obrobok pripravený na odobratie z dopravníka a či je pracovný stôl obrábacieho centra v požadovanej polohe pre uloženie obrobku. Na obrázku je možné vidieť vizuálnu reprezentáciu programu robota. V tomto prípade je robot vybavený zváracím efektorom a potrebuje prekonať prekážku na pracovnom stole. V programe sú zadefinované jednotlivé body tak,aby sa robot prekážke vyhol a presunul sa zo začiatočného do koncového bodu čo najideálnejšou dráhou.
Ako robota naprogramovať?
Program je ideálne tvoriť tak, aby robot dokázal plniť svoju úlohu čo najrýchlejšie a najefektívnejšie teda aby bol pracovný čas cyklu čo najkratší. Dôležitou otázkou však je aj AKO robota naprogramovať. Nedá sa objektívne posúdiť ktorá metóda programovania je obecne výhodnejšia. Obe metódy majú svoje výhody a nevýhody. Preto je pri vytváraní programu potrebné posúdiť konkrétnu situáciu a zvoliť vhodnú metódu.
Zdroje: DANIEL, E., KANDRAY, P.E. 2010. Programmable aion technologies. Indrustrial Press Inc. New York. ROBO DK. 2019. Why is motion planning a big trend right now. [online]. Dostupné na: <https://robodk.com/blog/motion-planning-trend/>
Autor: Jakub Michalčík | Daily Automation