
Tento robot si poradí aj s káblami | MIT
MIT | Určite sa vám to už stalo tiež. Museli ste pracovať s káblami ktoré boli pomotané, veľmi tenké alebo sa vždy skrúcali. Ak je ale toto problém pre človeka, aký veľký to je problém pre robota? Touto problematikou sa zaoberajú aj na MIT kde vyvinuli uchopovač vhodný pre manipuláciu s káblami.
Keď sa kábel kĺže medzi prstami, jeho tvar sa neustále mení a prsty robota musia neustále snímať a upravovať polohu a pohyb kábla.
Štandardným postupom pre vykonávanie úloh spojených s kabelážou bolo káble uložiť do prípravkov. Skupina výskumníkov z CSAIL (Computer Science and Artificial Intelligence Laboratory), ktorú zastrešuje MIT sa na túto problematiku pozrela z iného uhla a použili viac "ľudskú" techniku. Nový systém využíva na úspešnú manipuláciu s voľne sa pohybujúcimi káblami dvojicu mäkkých robotických chápadiel. Tieto chápadlá v sebe ukrývajú jemné hmatové senzory.
Sledovanie káblov je náročné z dvoch dôvodov: Najprv to vyžaduje kontrolu „sily uchopenia“ (aby sa umožnilo plynulé kĺzanie) a „ polohy uchopenia“ (aby sa zabránilo vypadnutiu kábla z prstov uchopovača). Tieto informácie je ťažké zachytiť z konvenčných systémov počas nepretržitej manipulácie, pretože ich pohyb je nepredvídavý.
Krok za krokom
Prvým krokom tímu bolo vyrobiť nové dvojprstové chápadlo. Protichodné prsty sú ľahké a rýchlo sa pohybujú. To umožňuje svižné úpravy sily a polohy v reálnom čase. Na špičkách prstov sú snímače „GelSight“. Tie sú vyrobené z mäkkej gumy a "spolupracujú" so zabudovanými kamerami.
Druhým krokom tímu bolo vytvorenie súhry vnímania a kontroly, ktorý umožní manipuláciu s káblami. Na vnímanie polohy kábla medzi prstami a meranie trecích síl použili senzory GelSight. Dva uchopovače pracujú paralelne: jeden moduluje pevnosť uchopenia, zatiaľ čo druhý upravuje polohu chápadla tak, aby bol kábel v chápadle.
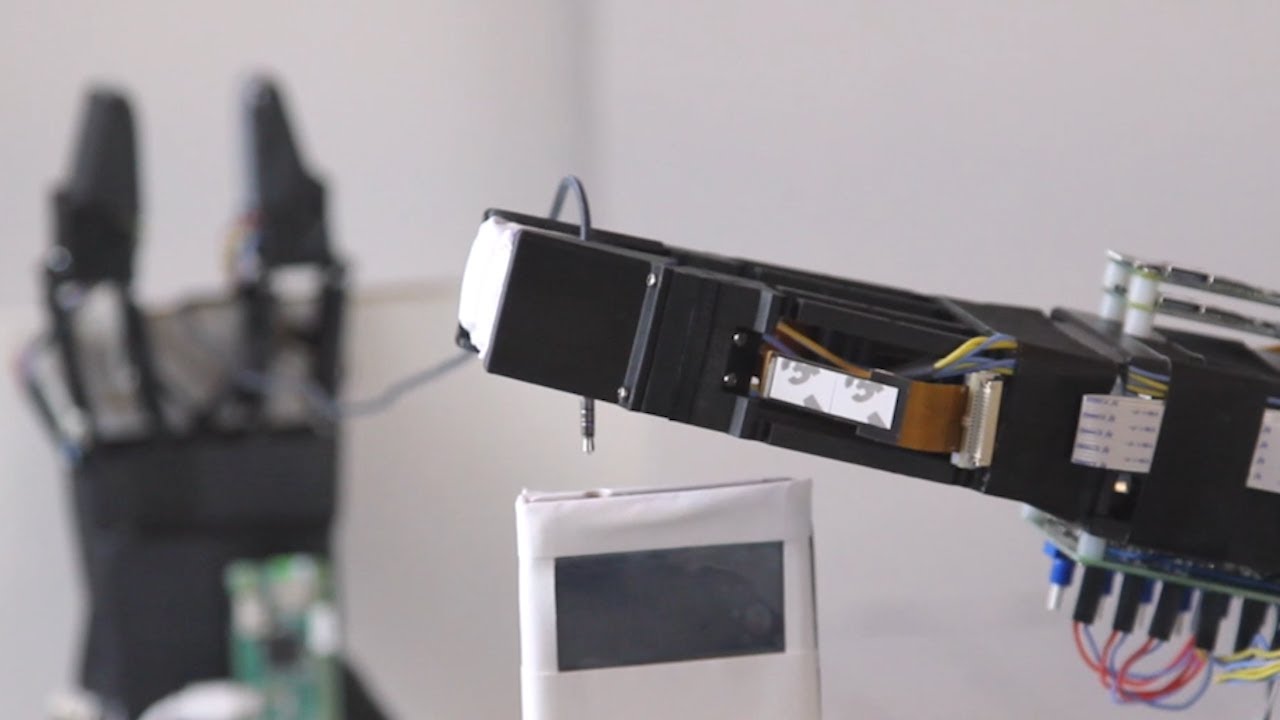
Ako ukážka zdatnosti robota slúži video, kde si robot poradí s káblom od slúchadiel a zasunie jack do telefónu.
https://www.youtube.com/watch?time_continue=45&v=3SSsxf5PoLQ&feature=emb_logo&ab_channel=MITCSAIL
„Manipulácia s mäkkými predmetmi je v našom každodennom živote bežná. Chceli by sme, aby roboty pomáhali ľuďom vykonávať tento druh práce najmä, keď sú úlohy opakované, nudné alebo nebezpečné." hovorí Yu She, postdoktorka MIT a hlavná autorka nového článku o systéme.
MIT sa pozerá vpred
Tím MIT zistil, že bolo ťažké vytiahnuť kábel späť, keď sa dostal k okraju prsta, kvôli povrchu senzora GelSight. Preto dúfajú, že zlepšia tvar snímača čidla, aby zvýšili celkový výkon. V budúcnosti plánujú študovať zložitejšie úlohy manipulácie s káblami, ako je vedenie káblov a ich vkladanie cez prekážky. Tiež chcú preskúmať úlohy autonómnej manipulácie s káblami v automobilovom priemysle.
Mohlo by ťa zaujímať: Roboty postavia priehradu v Japonsku

Autor: Matej Seman|Daily Automation
Zdroj: news.mit.edu