

#04 Servomechanizmy - Princíp a konštrukcia
V článku "Servomechanizmy | Úvod" ste sa mohli dočítať niečo zo základov servomechanizmov. V danom príspevku sa čitateľ dočíta o princípoch a konštrukcií servomechanizmov.
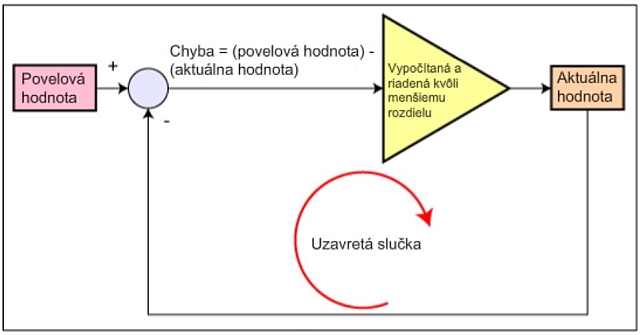
V úvodnom príspevku sme sa dočítali, že servomechanizmus sa skladá z troch častí (Povelová časť, časť radiča, časť ovládača a detektora). Hlavnou činnosťou a charakteristikou servosystému je to, že porovnáva hodnotu prichádzajúcu z povelovej časti s aktuálnou hodnotou prichádzajúcu s detektorov prostredníctvom spätnej väzby. Rozdiel z porovnávania sa snaží riadením servomotora minimalizovať na minimum.
Prečítaj si viac z kategórie: Pohony
Existujú tri rôzne povelové režimy (tri spôsoby regulácie) servosystémov:
- režim polohovej regulácie,
- režim rýchlostnej regulácie,
- režim regulácie krútiaceho momentu.
V určitých prípadoch je potrebné prechádzať s jedného režimu do druhého. Uveďme si príklad: navíjací stroj beží konštantnou rýchlosťou. Ide o režim riadenia rýchlosti. Keď sa materiál začne navíjať na navíjací bubon, je potrebné dosiahnuť konštantné napnutie materiálu. Pre dosiahnutie uvedeného je nutné prepnúť režim, a to do režimu regulácie krútiaceho momentu.
Na nasledujúcom obrázku môžeme pozorovať riadiacu slučku servomechanizmu.
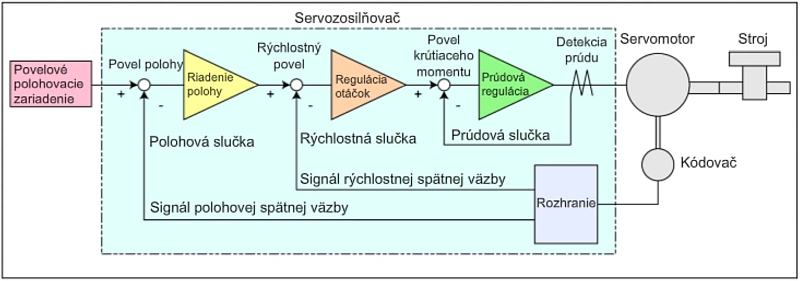
V striedavých servosystémoch deteguje snímač namontovaný na servomotore impulzné signály a prúd motora. Zo snímača sa informácie posielajú prostredníctvom spätnej slučku do servozosilňovača. V uvedenej spätnej väzbe sú tri rôzne slučky:
- polohová slučka: na základe získaných informácií z kódovača (snímača polohy) servozosilňovač vyhodnocuje a porovnáva žiadanú pozíciu s aktuálnou pozíciou,
- rýchlostná slučka je určená na riadenie rýchlosti, a to za pomoci signálov vygenerovaných z kódovača/ snímača,
- prúdová slučka riadi krútiaci moment na základe detekcie prúdu.
Princíp každej jednej slučky je založený na tom, aby bol rozdiel medzi povelovým signálom a spätnoväzobným signálom nulový. Je dôležite vziať do úvahy rýchlosť vykonávania jednotlivých slučiek, pričom platí nasledovné: najpomalšia vykonávaná slučka je polohová. Po nej nasleduje rýchlostná slučka a najrýchlejšia slučka je prúdová.
V nasledujúcej tabuľke si uvedieme, ktorá regulačná slučka je využívaná v ktorom regulačnom režime:
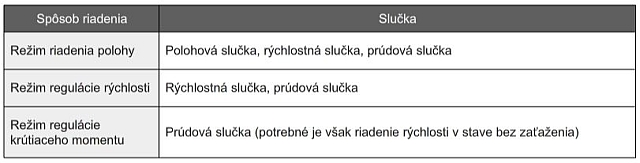
Režim riadenia polohy
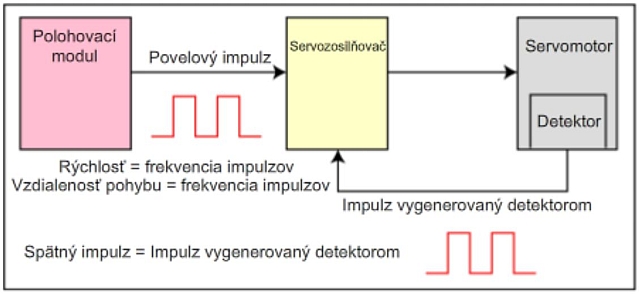
Predstavme si jednoduchú nasledovnú situáciu: pohybujúci sa materiál alebo určitý nástroj (vŕtačka), a to optimálnou, prípadne konštantnou rýchlosťou. Na určitej pozícii je potrebné zastavenie s vysokou presnosťou. Servomechanizmy sú na takéto aplikácie vhodným riešením. Pri riadení polohovania potrebuje motor v každom okamihu informácie zo snímača o rýchlosti motora. Viď nasledujúci obrázok.
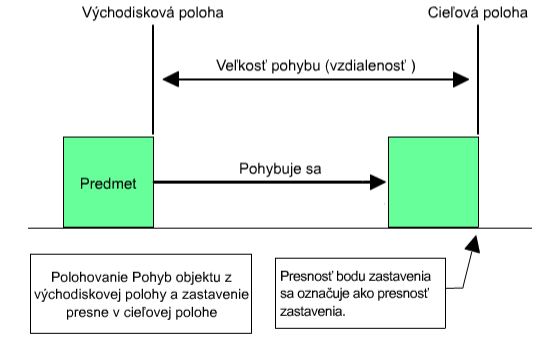
Pri základnom riadení polohy uvažujeme s nasledovným:
- veľkosť pohybu stroja je úmerná celkovému počtu povelových impulzov,
- rýchlosť stroja je úmerná rýchlosti/ frekvencií povelových impulzov,
- ukončenie polohovania môže byť ukončené s presnosťou +/- jeden impulz. Táto poloha je udržiavaná do doby, pokiaľ nie je na vstup slučky privedená nová žiadaná poloha (žiadosť o zmenu polohy),
- pri riadení polohy je nutné uvažovať s chybami ako je napríklad vôľa v mechanickom systéme.
Režim regulácie rýchlosti
Plynulý štart/ stop:
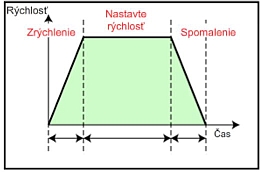
Uvedenou funkciou zrýchľovania/ spomaľovania rýchlosti predídeme napríklad otrasom stroja počas uvedených operácií, pričom rozsah regulácie rýchlosti je značne široký.
Režim riadenia krútiaceho momentu
Výstupným prúdom zo servozosilňovača dokážeme plynulo riadiť krútiaci moment servomotora. Pozrime sa na nasledujúci príklad (obrázok), pričom si uvedieme dôležitosť daného režimu. Predstavme si navíjaciu linku. Zo zväčšujúcim sa polomerom navíjacieho kotúča sa zvyšuje aj krútiaci moment záťaže. Pre udržanie konštantne napnutého navíjaného materiálu je preto potreba konštantného krútiaceho momentu zo servomotora.
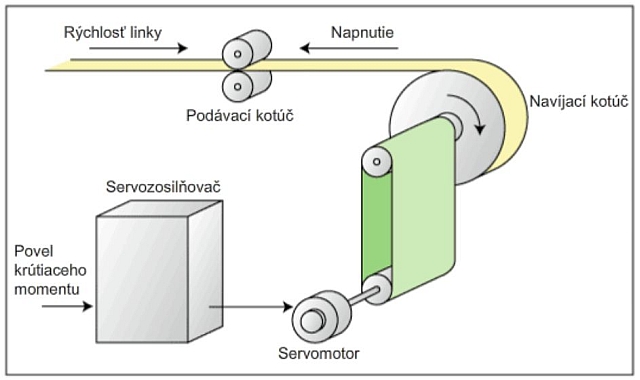
Pri riadení krútiaceho momentu je však potrebné dbať na nastavenie obmedzenia rýchlosti, pretože motor sa pri malom zaťažení rozbehne s veľmi vysokou rýchlosťou. Ak by došlo ku situácií ako je náhodne pretrhnutie navíjaného materiálu, rýchlosť servomotora by mohla prudko stúpnuť.
Autor:
Mitsubishi Electric Europe B.V. – odštěpný závod Czech Branch CT Zone, areál Ponávka, Škrobárenská 507/12, CZ-617 00 Brno www.cz3a.mitsubishielectric.com
Našiel si nezrovnalosti v tomto príspevku? Daj nám o tom vedieť. Pomôžeš tým skvalitniť obsah portálu pre priaznivcov Daily Automation. Vopred ďakujeme za Tvoju ochotu!