

#11 Umiestnenie ochranných zariadení | Priame priblíženie
Bezpečná vzdialenosť je jeden z najdôležitejších atribútov pri zabezpečovaní aizovaných pracovísk. Hlavným cieľom pri zabezpečovaní bezpečnostnými prvkami je predísť kolíziám alebo úrazom. Na to aby bolo zabezpečenie dostatočné je potrebné vybrať správny typ bezpečnostného prvku a správne ho umiestniť. Umiestnenie ochranných zariadení musí byť v dostatočnej vzdialenosti na to, aby zariadenie dokázalo vypnúť nebezpečnú funkciu stroja skôr, ako sa osoba dostane do nebezpečného priestoru. Za nebezpečný priestor sa považuje pracovný priestor daného zariadenia v ktorom môže dôjsť k úrazu.
Bezpečná vzdialenosť je predpisovaná normou STN EN ISO 13855:2010. Po výbere vhodného ochranného zariadenia by malo byť toto zariadenie umiestnené v súlade s požiadavkami danej normy.
Na správne určenie bezpečnej vzdialenosti je potrebné, ešte pred začatím návrhu zabezpečenia, určiť o aký typ priblíženia ide. Sú známe 3 základné typy priblíženia k nebezpečnému priestoru:
- Priame priblíženie,
- Nepriame priblíženie,
- Priblíženie pri ktorom je nutné otvoriť ochranný kryt s blokovacím zariadením bez zaistenia.
Priame priblíženie

Za priame priblíženie sa považuje priblíženie pri ktorom je možné vstúpiť do nebezpečného priestoru priamo, to znamená že, vstup do nebezpečného priestoru nie je zabezpečený žiadnym oplotením alebo mechanickou prekážkou.
Umiestnenie ochranných zariadení pri priamom priblížení je možné rozdeliť do 5 krokov, ktoré je potrebné splniť, aby bolo zabezpečenie správne.
Krok 1. Zvoliť vhodné ESPE - bezdotykové elektrické snímacie zariadenie
Pri výbere vhodného ESPE (bezdotykové elektrické snímacie zariadenie) je potrebné zvážiť akú úroveň zabezpečenia podľa PL (Performance level rating) alebo SIL (Safety integrity level) chceme dosiahnuť. V závislosti od tejto úrovne je potrebné zvoliť vhodné ESPE na to, aby toto zabezpečenie spĺňalo požadované kritéria. Úroveň zabezpečenia daného ochranného zariadenia predpisuje výrobca tohto zariadenia. ESPE zariadenia sa rozdeľujú na AOPD - aktívne optoelektronické ochranné zriadenia a AOPDDR - aktívne optoelektronické snímacie zariadenia s difúznym odrazom. Medzi takéto ochranné zariadenia patria svetelné závory, laserové skenery, jednolúčové svetelné závory a bezpečnostné kamerové videnie.
Krok 2. Určiť smer priblíženia
Pri umiestnení ochranných zariadení sa rozlišujú 3 základné typy umiestnenia:
- Vertikálne umiestnenie,
- Horizontálne umiestnenie,
- Umiestnenie pod uhlom,
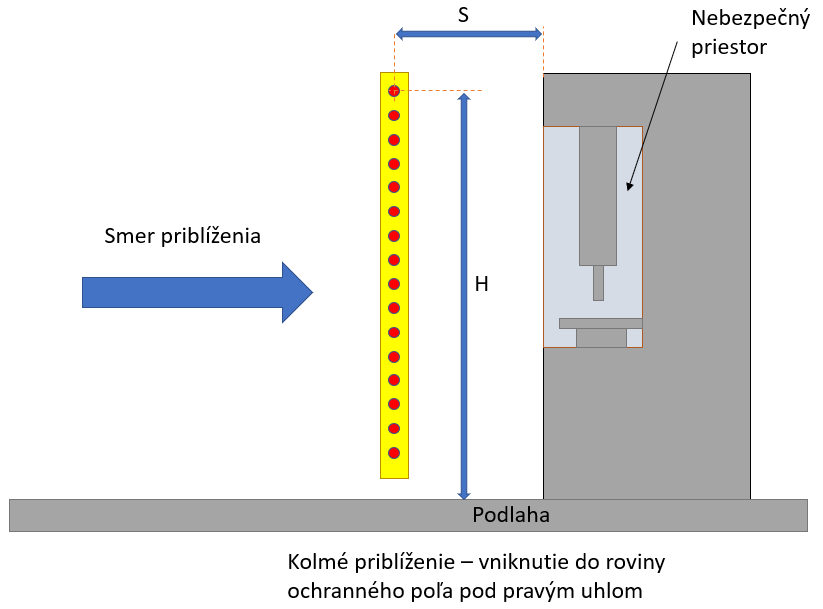
Pri vertikálnom umiestnení je uhol medzi referenčnou rovinou ( v tomto prípade je to podlaha) a ochranným poľom ESPE 90°. Smer priblíženia k ochrannému poľu bezpečnostného prvku je teda kolmý, to znamená, že ide o kolmé priblíženie. Parameter S (mm) predstavuje bezpečnú vzdialenosť - vzdialenosť od konca nebezpečného priestoru po začiatok snímania ochranného poľa. Parameter H (mm) predstavuje vzdialenosť horného okraja ochranného poľa od referenčnej roviny. 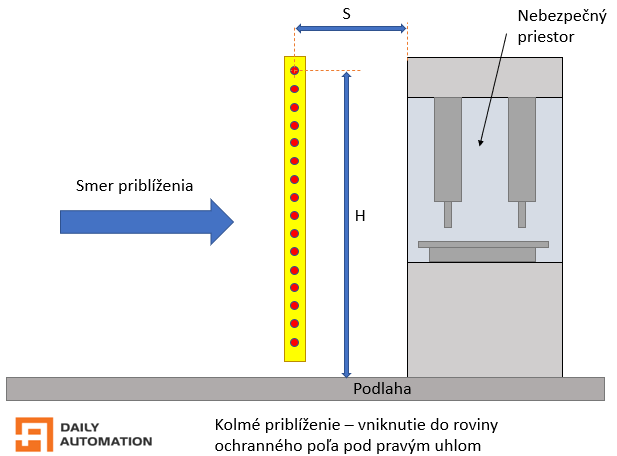
{kind=link}
Pri horizontálnom umiestnení je bezpečnostný prvok umiestnený tak, že jeho ochranné pole je paralelné s referenčnou rovinou. Smer priblíženia k nebezpečnému priestoru cez ochranné pole je paralelný s týmto poľom. Hovoríme teda o paralelnom priblížení. Hodnota bezpečnej vzdialenosti S (mm) a výšky horného okraja ochranného poľa H (mm) budú iné ako v predchádzajúcom prípade, keďže sa jedná o iný typ umiestnenia. 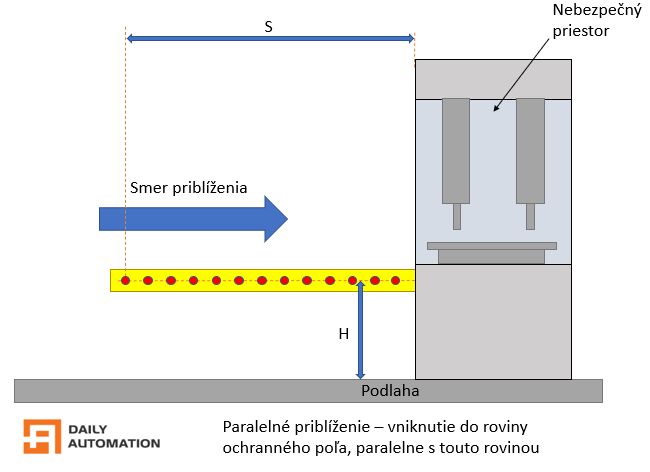 Umiestnenie ochranných zariadení je detailnejšie znázornené v nižšie uvedenom videu, kde je znázornený rozdiel medzi vertikálnym a horizontálnym umiestnením. https://youtu.be/b_Y9fJbiTKw?t=90 Pri umiestnení pod uhlom sa priblíženie rozdeľuje buď na kolmé alebo paralelné v závislosti od uhla pod ktorým je ochranné zariadenie umiestnené. Ak je uhol umiestnenia ochranného zariadenia od 0° do 30° hovoríme o paralelnom priblížení a ak je uhol od 30° do 90° ide o kolmé priblíženie.
Umiestnenie ochranných zariadení je detailnejšie znázornené v nižšie uvedenom videu, kde je znázornený rozdiel medzi vertikálnym a horizontálnym umiestnením. https://youtu.be/b_Y9fJbiTKw?t=90 Pri umiestnení pod uhlom sa priblíženie rozdeľuje buď na kolmé alebo paralelné v závislosti od uhla pod ktorým je ochranné zariadenie umiestnené. Ak je uhol umiestnenia ochranného zariadenia od 0° do 30° hovoríme o paralelnom priblížení a ak je uhol od 30° do 90° ide o kolmé priblíženie. 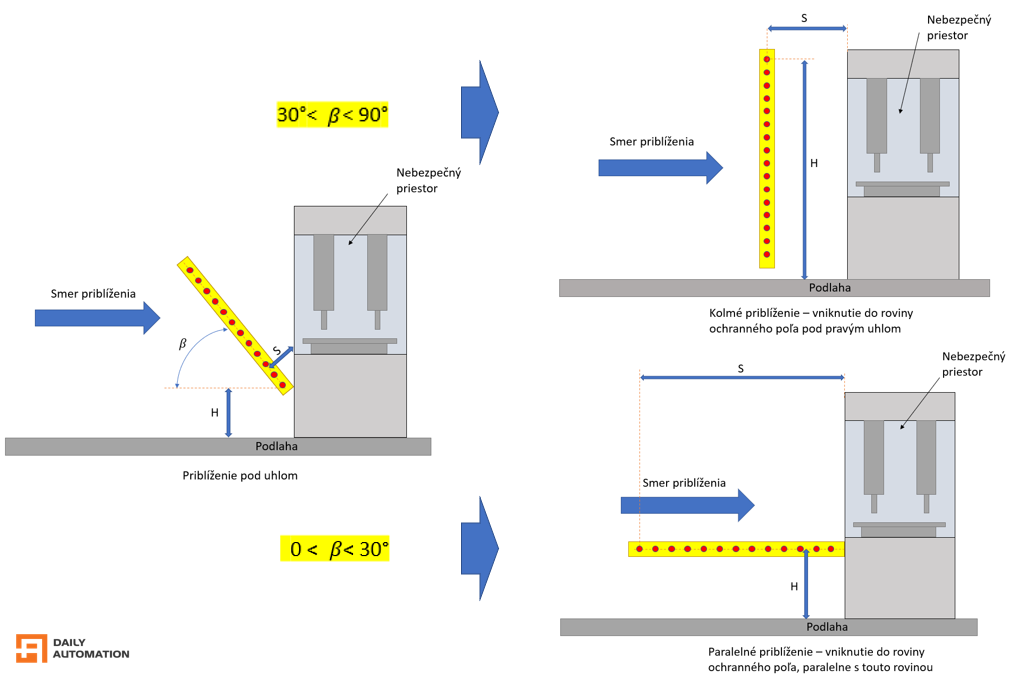
Krok 3. Zvoliť schopnosť snímania a určiť čas zastavenia systému
Schopnosť snímania d (mm) predstavuje rozlíšenie použitého ESPE. Určuje akú najmenšiu veľkosť predmetu dokáže ESPE zosnímať. Vyberá sa v závislosti od toho, ktorú časť ľudského tela budeme snímať. Rozsah tohto parametra môže byť od 14 mm - 200 mm. Čím je schopnosť snímania menšia, tým menšie sú predmety ktoré dokáže ESPE zosnímať. Celkový čas zastavenia systému T (s) predstavuje čas za ktorý je vypnutá nebezpečná funkcia stroja po tom, ako bol bezpečnostným prvkom zistený nežiadúci vstup do jeho ochranného poľa. Čas T pozostáva z T = t1 + t2, kde čas t1 je maximálny možný čas medzi spustením ochranného zariadenia a výstupným signálom, ktorý je vypnutý a čas t2 je maximálny možný čas na skončenie nebezpečnej funkcie stroja po tom, ako signál ostal vypnutý. Celkový čas zastavenia je závislý na snímačoch, akčných členoch a dobehoch mechanických prvkov.
Krok 4. Výpočet minimálnej bezpečnej vzdialenosti
Minimálna bezpečná vzdialenosť sa určuje podľa základného vzťahu S = K x T + C. Základný vzťah je ale odvodený v závislosti od toho či počítame bezpečnú vzdialenosť pri kolmom priblížení alebo pri paralelnom priblížení. Určenie bezpečnej vzdialenosti pri kolmom priblížení sa rozdeľuje podľa schopnosti snímania na d ≤ 40mm alebo d >40mm.
Kolmé priblíženie s d ≤ 40 mm
Hodnota minimálnej bezpečnej vzdialenosti sa v tomto prípade určuje podľa vzťahu S = K x T + CRT , kde K = 2000 mm/s a predstavuje stanovenú rýchlosť priblíženia sa ľudskej končatiny k nebezpečnému priestoru. Hodnota CRT predstavuje prídavnú vzdialenosť, ktorá je závislá od schopnosti snímania d, pre to platí CRT = 8 x (d-14). Hodnota minimálnej bezpečnej vzdialenosti S nesmie byť menšia ako 100 mm. V prípade že, S = 500 mm hodnota S sa musí znovu vypočítať s použitím K = 1600 mm/s. Pokiaľ výsledok tohto nového výpočtu je menší ako 500 mm platí, že S= 500 mm.
Kolmé priblíženie s d >40 mm
V tomto prípade sa hodnota minimálnej bezpečnej vzdialenosti počíta podľa vzťahu S = K x T + C , kde hodnota K = 1600 mm/s a predstavuje stanovenú rýchlosť priblíženia sa ľudského tela k nebezpečnému priestoru a C = 850 mm, predstavuje štandardnú dĺžku ľudskej paže. Uvedené údaje sa nachádzajú v norme STN EN ISO 13855: 2010.
Paralelné priblíženie
Pri tomto type priblíženia sa hodnota minimálnej bezpečnej vzdialenosti určuje ako vzťah S = K x T + C, kde K = 1600 mm/s , prídavná vzdialenosť C sa určí zo vzťahu C = 1200 mm - 0,4 x H (C nesmie byť menšie ako 850 mm) , a výška ochranného poľa H = 15 x (d -50 ), pokiaľ je d < 50 mm, musí byť výška ochranného poľa H ≥ 0. V prípade, že je už výška ochranného poľa stanovená nad referenčnou rovinou, musí sa potrebné rozlíšenie vypočítať podľa vzťahu: d = (H/15) +50, pričom platí, že H ≤ 1000 mm.
Krok 5. Zohľadniť možné prekonanie ponad ochranné pole
Minimálna bezpečná vzdialenosť nie je spávne určená a umiestnenie ochranných zariadení nie je správne, ak nie je zohľadnený fakt možného prekonania ponad ochranné pole. V prípade kedy nie je výška ochranného poľa dostatočná je možné dosiahnuť ponad ochranné zariadenie ľudskou rukou bez zosnímania ochranným poľom. V takomto prípade by mohlo dôjsť k úrazu, kedže ľudská končatina by sa mohla dostať až do nebezpečného priestoru, bez zosnímania ochranným poľom, a preto je potrebné buď zvýšiť horný okraj ochranného poľa alebo zväčšiť hodnotu prídavnej vzdialenosti CRO, čo predstavuje prídavnú vzdialenosť v prípade možného prekonania ponad ochranné pole. Norma STN EN ISO 13855: 2010, uvádza tabuľky hodnôt pomocou ktorých je možné správne určiť výšku horného okraja ochranného poľa resp. prídavnú vzdialenosť CRO v prípade možného prekonania ponad ochranné pole. Parameter a predstavuje výšku horného okraja nebezpečného priestoru a parameter b výšku horného okraja ochranného poľa. 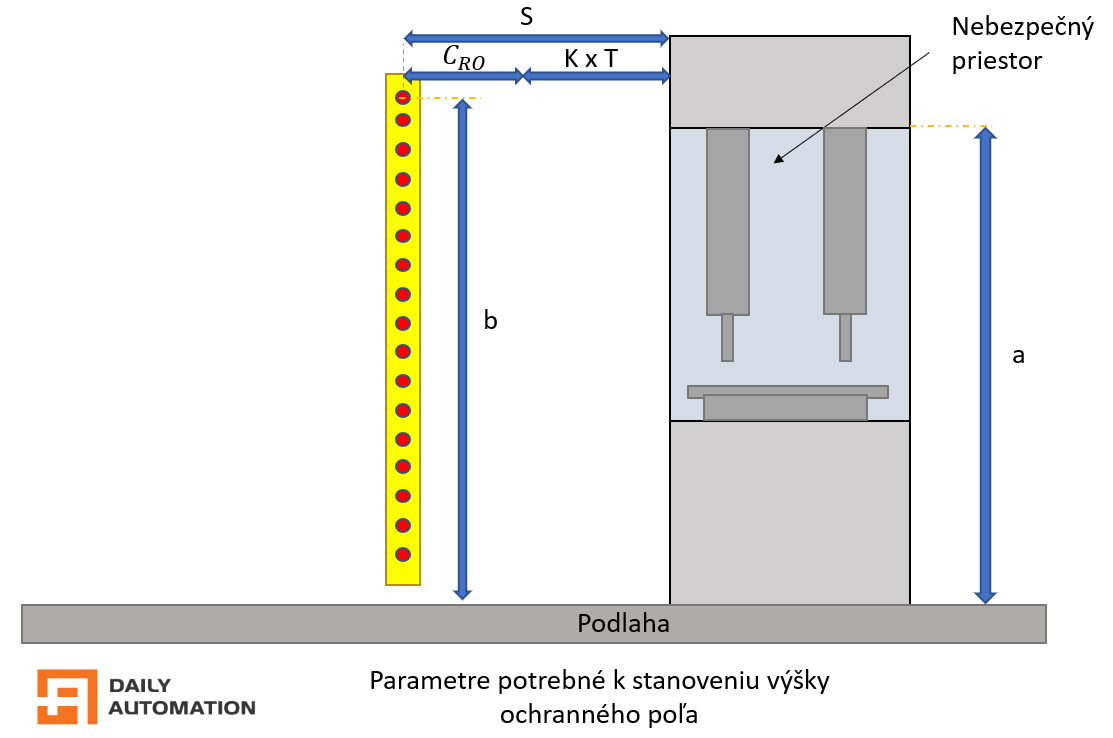
5.1 Zvýšiť horný okraj ochranného poľa
Norma STN EN ISO 13855:2010 dáva k dispozícii aj tabuľku pomocou ktorej je možné určiť výšku horného okraja ochranného poľa b, v prípade kedy nie horný okraj vopred určený. Pri určovaní parametru b je potrebné najskôr zistiť výšku nebezpečného priestoru a (1). Ďalej sa určí hodnota CRT , ktorá je závislá na schopnosti snímania a následne sa v riadku v ktorom je učený parameter a vyberie hodnota, ktorá je rovná alebo najbližšia menšia s CRT (2). V tomto bode sa spustí kolmica smerom nadol až na parameter b (3). Týmto spôsobom je možné určiť výšku horného okraju ochranného poľa v prípade možného prekonanie ponad ochranné pole. V prípade, že prekonanie ponad ochranné pole nie je možné, prídavok CRO nie je potrebný. 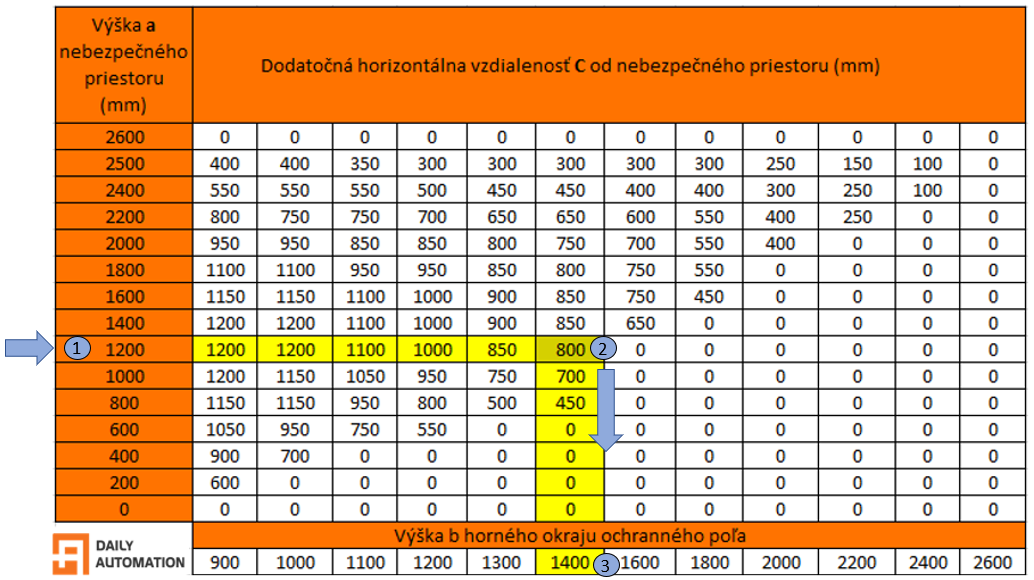
5.2 Zväčšiť minimálnu bezpečnú vzdialenosť keď je horný okraj ochranného poľa vopred daný
Na zväčšenie bezpečnej vzdialenosti o hodnotu prídavnej vzdialenosti CRO sa využíva tá istá tabuľka ako v predchádzajúcom prípade len v inom poradí. V tomto prípade sú známe hodnoty parametra b (1) a parametra a (2). Priesečník týchto dvoch hodnôt určuje hodnotu prídavnej vzdialenosti CRO (3). V prípade, že je CRO > CRT nahradzuje hodnota CRO hodnotu CRT vo vzorci. 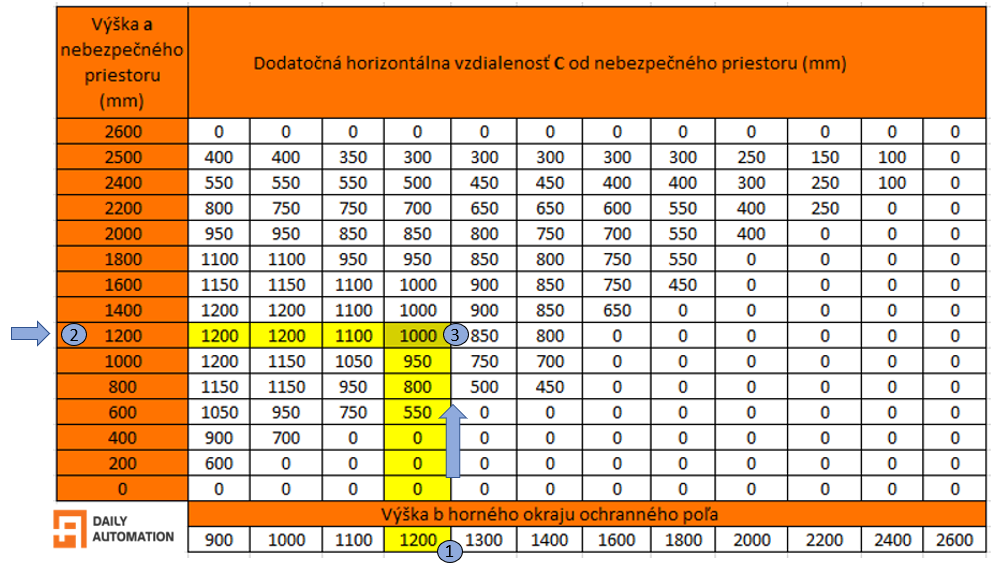 Zdroj:
Zdroj:
autor: Adamec Ján / DailyAutomation