

#10 Kalibrácia priemyselných robotov
Tento príspevok je zameraný na problematiku spojenú s kalibráciou priemyselných robotov, jej význam pre presnosť polohovania TCP bodu v pracovnom priestore robota a metódy kalibrácie, ktoré sú aplikovateľné pre priemyselné roboty.
Pojem kalibrácia je používaný aj v súvislosti s nastavením TCP bodu robota. Kalibráciou TCP sa v tomto prípade rozumie definovanie počiatku nástrojového súradnicového systému. Toto pomenovanie je najviac spájané s nastavením, resp. spresnením nastavenia TCP bodu na špičke zváracieho drôtu, pri zváracích hlaviciach.
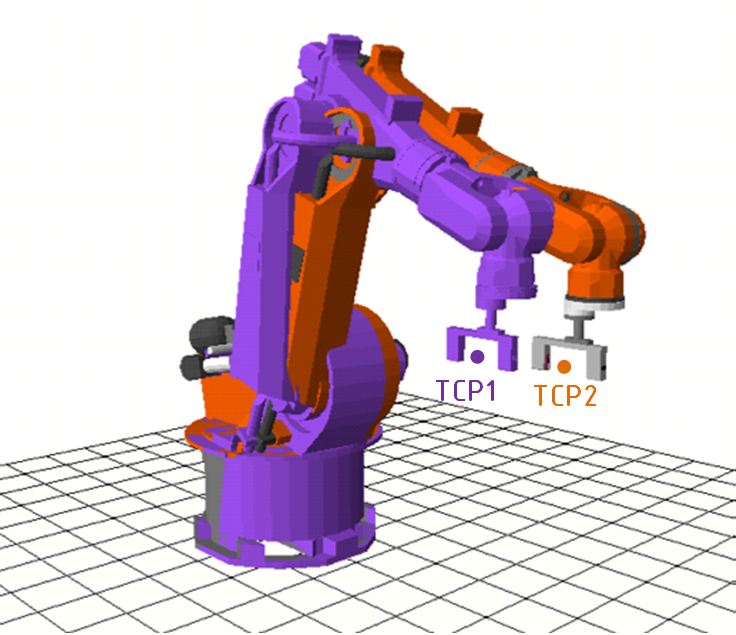 Kalibrácia opisovaná v tejto diplomovej práci predstavuje definovanie nulových pozícií jednotlivých kĺbov robota. Je ju možné označiť ako proces, ktorého úlohou je zabezpečiť, aby údaje zo snímačov v jednotlivých kĺboch zodpovedali skutočnej polohe ramena robota. Cieľom kalibrácie je zlepšenie presnosti určenia polohy TCP bodu robota v jeho pracovnom priestore. Pri sériovej kinematike, kde sú jednotlivé kinematické dvojice radené za sebou, sa prípadné odchýlky v jednotlivých kĺboch robota navzájom spočítavajú, čo v konečnom výsledku spôsobí odlišné (nesprávne) zaujatie polohy TCP bodu, v porovnaní s polohou zodpovedajúcou hodnotám zo snímačov. Tento stav zobrazuje obrázok (vedľa textu), kde TCP 1 predstavuje skutočne nadobudnutú polohu ramena robota a poloha TCP 2 zodpovedá údajom zo snímačov .Údaje o polohe kĺbov robota získava riadiaci systém zo snímačov – enkodérov, ktoré sú súčasťou servomotorov.
Kalibrácia opisovaná v tejto diplomovej práci predstavuje definovanie nulových pozícií jednotlivých kĺbov robota. Je ju možné označiť ako proces, ktorého úlohou je zabezpečiť, aby údaje zo snímačov v jednotlivých kĺboch zodpovedali skutočnej polohe ramena robota. Cieľom kalibrácie je zlepšenie presnosti určenia polohy TCP bodu robota v jeho pracovnom priestore. Pri sériovej kinematike, kde sú jednotlivé kinematické dvojice radené za sebou, sa prípadné odchýlky v jednotlivých kĺboch robota navzájom spočítavajú, čo v konečnom výsledku spôsobí odlišné (nesprávne) zaujatie polohy TCP bodu, v porovnaní s polohou zodpovedajúcou hodnotám zo snímačov. Tento stav zobrazuje obrázok (vedľa textu), kde TCP 1 predstavuje skutočne nadobudnutú polohu ramena robota a poloha TCP 2 zodpovedá údajom zo snímačov .Údaje o polohe kĺbov robota získava riadiaci systém zo snímačov – enkodérov, ktoré sú súčasťou servomotorov.
Spôsoby kalibrácie:
Ako už bolo uvedené, účelom kalibrácie je zabezpečiť, aby údaje z enkodérov zodpovedali skutočnej polohe ramena robota. Kalibráciu vykonáva výrobca robota v záverečnej fáze jeho montáže a zvyčajne nie je potrebné ju opakovať počas bežnej prevádzky. V priemyselnej praxi sa však vyskytujú situácie, ktoré vykonanie kalibrácie vyžadujú:
- Nežiaduca kolízia na pracovisku – napr. úder alebo náraz do manipulátora robota,
- Výmena motora alebo enkodéra v niektorej z riadených osí,
- Výmena vnútornej kabeláže,
- Vybitie záložných batérií a z toho dôvodu strata kalibračných údajov.
Existuje niekoľko postupov kalibrácie, ktoré sa u jednotlivých výrobcov robotov čiastočne líšia. Spoločnou a jednoduchou metódou je kalibrácia pomocou referenčných značiek. Táto technika je založená na vizuálnom nastavení každej osi robota do polohy 0°, s využitím referenčných značiek umiestnených na jednotlivých osiach robota. Sú to napr. štítky, zárezy a pod.
Po nastavení robota do referenčnej polohy, riadiaci systém vykoná aicky korekciu hodnôt z enkodérov pre každú z riadených osí. Presnosť uvedeného spôsobu kalibrácie závisí na vizuálnom nastavení a teda jedná sa o menej presnú metódu.
Táto nevýhoda vizuálneho nastavenia nulových polôh osí u robotov KUKA je odstránená možnosťou použitia číselníkového odchýlkomera alebo elektronického zariadenia, pre presné určenie referenčnej polohy (nasledujúci obrázok).

Zdroj:
- TLACH, V. 2016. Návrh pracoviska pre meranie pracovných charakteristík priemyselného robota FANUC LR Mate 200iC : diplomová práca. Žilina : ŽU, 2016. 126 s.
- JOHNSRUD, V. 2014. Improvement of the Positioning Accuracy of Industrial Robots: diplomová práca, Trondheim : Norwegian University of Science and Technology, 2014. 117 s.
- http://www.vision.fraunhofer.de/de/projekte/854.html
Vladimír Tlach