

#05 TCP a súradnicové systémy
Súradnicové systémy robota
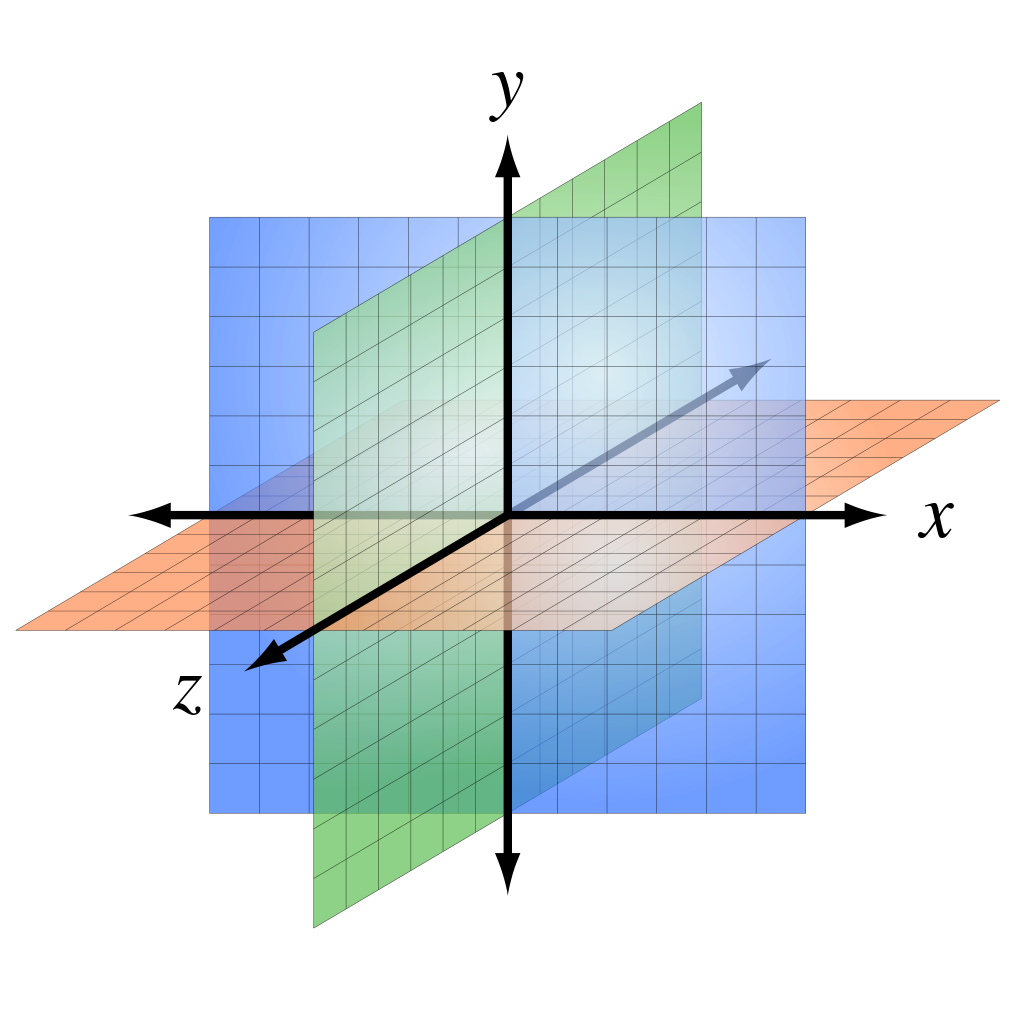
Pri všetkých priemyselných robotoch, je pre správnu funkciu programu potrebné určiť súradnicový systém reprezentujúci reálnu polohu robota a dráhu efektora v priestore. Z hľadiska geometrie je možné súradnicové systémy rozdeliť na viac druhov ako napr. kartézske, sférické, cylindrické a pod. Väčšina priemyselných robotov využíva práve kartézske súradnicové systémy. Poloha programovaného bodu je určená číselnými súradnicami v osiach X,Y a Z a hodnotou rotácie okolo osí X,Y a Z.
Definovanie polohy robota a nástroja
TCP - Tool Center Point a súradnicové systémy slúžia na definovanie polohy a dráhy robota pri programovaní. Do programu sa ukladajú jednotlivé polohy robota ako body v 3D súradnicovom systéme. Súradnicových systémov existuje viac a líšia sa v umiestnení počiatku. Tieto systémy môžu byť vopred zadefinované, alebo ich definuje programátor pri programovaní. Možnosť definovať vlastné súradnicové systémy môže byť pri tvorbe programu veľkou výhodou. Napríklad pri riešení úlohy, kde robot pracuje na pracovnom stole, je výhodné prideliť stolu vlastný súradnicový systém s počiatkom v strede alebo na rohu stola.
TCP
Tool Center Point je koncový bod efektora robota. Je závislý od typu použitého efektora a jeho poloha môže byť zadefinovaná programátorom. Poloha tohto bodu sa zvyčajne líši podľa toho, o aký typ efektora ide. V prípade manipulačného efektora, akým je napríklad gripper, môže byť TCP zadefinovaný v centre uchopenia obrobku alebo objektu. Pokiaľ ide o technologický nástroj ktorým môže byť vrták alebo zvárací horák, zvyčajne je TCP zadefinovaný na špičke daného nástroja.
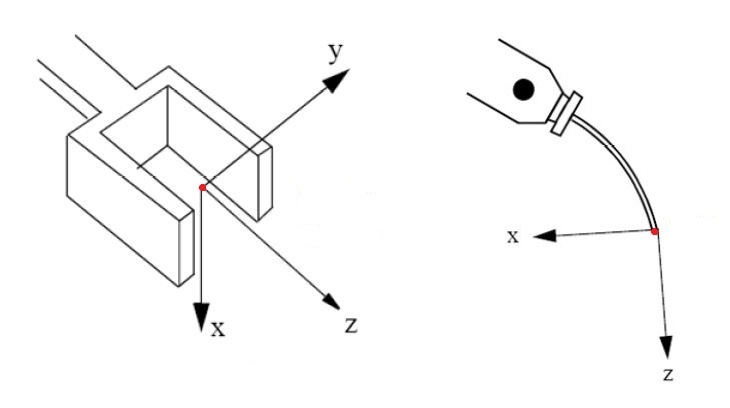 Práve TCP je bod ktorého poloha sa ukladá do programu. Popisuje presnú polohu nástroja a jeho orientáciu v danej polohe.
Práve TCP je bod ktorého poloha sa ukladá do programu. Popisuje presnú polohu nástroja a jeho orientáciu v danej polohe.
Rozdelenie súradnicových systémov
-
Základný súradnicový systém (Base Coordinate System - BCS)
Základný súradnicový systém je počiatočne umiestnený v mieste montážnej a stacionárnej základne robota. -
Globálny súradnicový systém (World Coordinate System - WCS)
Poloha globálneho súradnicového systému je buď totožná s BCS alebo je špeciálne definovaná. Tento systém slúži na určenie polohy TCP bodu pomocou súradníc X,Y a Z a natočenia TCP bodu okolo osí súradnicového systému. -
Súradnicový systém zápästia (príruby) (Flange Coordinate System - FCS)
Počiatok súradnicového systému zápästia (príruby) robota je definovaný v strede zápästia robota. Je vopred určený výrobcom a jeho poloha sa nedá meniť. Tento súradnicový systém popisuje orientáciu použitého nástroja alebo efektora a kladný smer osi X je totožný s pracovným smerom nástroja alebo efektora. -
Nástrojový súradnicový systém (Tool Coordinate System -TCS)
Počiatkom nástrojového súradnicového systému je TCP bod. Nástrojový súradnicový systém určuje polohu a orientáciu nástroja alebo efektora. Počiatočne je jeho poloha totožná s polohou FCS keďže aj poloha TCP bodu je výrobcom definovaná v počiatku FCS. Polohu TCP bodu a teda aj polohu a orientáciu TCS je potrebné upraviť podľa použitého nástroja alebo efektora. -
Používateľský súradnicový systém (User Coordinate System - UCS)
Počiatok tohto systému definuje programátor a je možné ho zadefinovať ľubovoľne podľa potreby. Týchto súradnicových systémov je možné vytvoriť viac a definujú sa na základe WCS. Využívajú sa na určenie pracovnej plochy alebo pracovnej roviny pri programovaní. -
Súradnicový systém objektu (obrobku) (Object Coordinate System - OCS)
Počiatok tohto systému je definovaný vzhľadom na UCS. Vytvorenie OCS taktiež posudzuje programátor podľa zadanej úlohy. Zvyčajne sa tento systém definuje pre obrobok, s ktorým robot pracuje, alebo pre objekt s ktorým manipuluje. Pre každý objekt je potrebné ho definovať samostatne. OCS je vhodný pre offline programovanie, keďže jednotlivé pozície je možné prebrať z výrobnej dokumentácie.

Využitie súradnicových systémov
Pohyby robota je potrebné presne dopredu určiť a naprogramovať. Tieto pohyby sú založené na výbere súradnicového systému a popise jednotlivých pohybov pomocou súradníc bodov daného systému. Zadávanie bodov v rôznych súradnicových systémoch môže zjednodušiť tvorbu programu a definovanie jednotlivých bodov.
Autor: Jakub Michalčík | Daily Automation
Zdroje:- NAGAL, D. et. al. Coordinate Systems for Industrial Robots. 2016.
- Príručka: Automatizačná a robotická technika. 2011. Košice.
- LEHTLA, T. Introduction to robotics. Talinn. 2008.
- COMPAS. Coordinate frames. [online]. Dostupné na: <https://gramaziokohler.github.io/compas_fab/latest/examples/01_fundamentals/02_coordinate_frames.html>